- Informationen
- KI Chat
Musterloesung-WS18-Anziehbare Robotertechnologien
Anziehbare Robotertechnologien (23351)
Karlsruher Institut für Technologie
Empfohlen für dich




Kommentare
Text Vorschau
KIT-Department of Informatics
Prof. Dr.-Ing. Tamim Asfour and Prof. Dr.-Ing. Michael Beigl
Reference solution for the exam
Wearable Robotic Technologies
am February 08, 2019, 06:00pm – 07:00 pm
Family name: Given name: Matriculation number:
David Marr 978-
Exercise 1 9 out of 9 points Exercise 2 10 out of 10 points Exercise 3 9 out of 9 points Exercise 4 8 out of 8 points Exercise 5 9 out of 9 points
Total: 45 out of 45 points
Grade: 1.
Exercise 1
- Anatomy (a) Reflex: A reflex is an involuntary neural response to a specific sensory stimulus and is a stereotypical behavior in both time and space.
(b) Solution is depicted in picture.
Figure 1: Reflex formation in the spinal cord
- (a) Type 1 Slow Twitch: maintaining postures, stabilizing joints Type 2A Fast Twitch Oxidative: swimming, bycycling Type 2B Fast Twitch Glycolytic: sprinting, jumping, weight lifting (b) Motor Unit Properties
Tabelle 1: Motor Unit Properties Type 1 Type IIa Contraction Speed Slow Fast Force of Unit Low High Fatigability Low Medium
- Object properties:
- texture
- hardness
- temperature
- weight
- volume
- shape
MF H = mF H ∗ g ∗ lF H = 5 N m
MT = ML + MF H = 85 N m
(b) Force FA
FA = 0_._ 5 · MlAT
FA = 425 N for MT = 85 N m ( FA = 450 N for MT = 90 N m
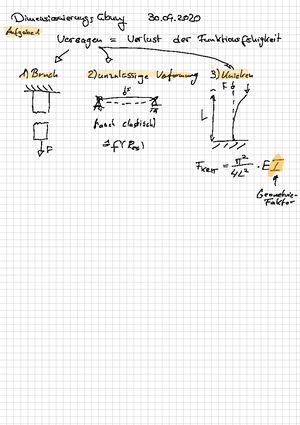
Exercise 3 Lower Limb Exoskeletons
- Ankle Joint: (a) Maximum joint torque during a gait cycle: Maximum torque: Tmax = 1_._ 8 Nmkg For a person with a weight of 100 kg: Tmax = 1_._ 8
[ Nm kg
] ·100 [ kg ] = 180 [ N m ] (b) Phase of the gait cycle where the torque-maximum occurs: Stance-phase 2. Elastic Actuators: (a) The given figure shows a series elastic actuator. The motor is directly connected with the two springs. (b) Schemes of a parallel and a series elastic actuator:
(c) Series elastic actuator: Fseries − elastic = Ftotal = Fmotor Parallel elastic actuator: Fparallel − elastic = Ftotal − Fmotor (d) Ankle Flexion/Extension, Hip Abduction/Adduction
- surface EMG signals fail over a period of time because neuronal signal degrade
- non-constant signals: electrodes move on skin, skin resistance varies due to sweat, etc.
- Alternative interfaces: - targeted muscle reinnervation closer to the torso (combined with surface EMG as well) - implanted EMG electrodes - direct nerve control - brain EEG electrodes
- Design requirements:
- anatomical correctness
- weight
- complexity
- cost
Exercise 5
- Energy Harvesting: impossible, sensor is based on a resistor and therefore passive
- Transducer (a) Components: resistance, oscillator, comparator (and possibly an amplifier) (b) Electric circuit: RC circuit
- Power and Energy Density: (a) Difference: power density: W / kg energy density: W h / kg energy density takes the factor of time into account (how long is energy availa- ble/stored (b) Energy Buffer with High Power Density: no (c) Exemplary Energy Buffer: one of the following buffers
Figure 3: Classification of battery technologies regarding power and energy density
Musterloesung-WS18-Anziehbare Robotertechnologien
Kurs: Anziehbare Robotertechnologien (23351)
Universität: Karlsruher Institut für Technologie



- Entdecke mehr von: